
This paper provides a comprehensive overview of current sense transformer (CST) technology, from operating principles and calculation methods to practical implementation in switched‑mode power supplies (SMPS) and automotive systems.
It begins with the fundamentals of CST operation, compares current sensing technologies across the frequency spectrum, and then develops a step‑by‑step design and calculation methodology based on YAGEO Group technical data. An integrated application section uses Coilcraft SMPS design material to illustrate CST behavior, core reset, and design trade‑offs in real controllers and reference designs.
Key Takeaways
- CSTs provide high‑accuracy, galvanically isolated, low‑loss current measurement, especially suited for high‑frequency AC and SMPS applications.
- Compared with shunt resistors, Hall‑effect sensors, and Rogowski coils, CSTs offer an excellent balance of isolation, efficiency, and EMI robustness in the high‑frequency domain, but they cannot sense DC.
- Correct CST selection is driven by RMS current rating, volt‑second product/flux density, turns ratio, terminating resistor, isolation rating, and mechanical constraints.
- A 3‑step selection flow (series choice, part number choice, error and delay analysis) enables fast and robust CST design.
- Case studies from automotive BMS and SMPS controllers demonstrate that well‑designed CSTs can achieve sub‑percent amplitude and phase errors over the intended frequency range.
Introduction
As energy efficiency becomes a defining requirement for modern electronic systems, the ability to measure current with high precision has never been more critical. Accurate current monitoring enables engineers to optimize power conversion, detect faults, and guarantee compliance with stringent safety standards.
Different application domains call for different sensing strategies. Broadly, current sensing can be divided into three categories:
- DC: DC current measurement (e.g., battery monitoring in EVs or energy storage systems)
- LF: Low-frequency measurement (50/60 Hz power distribution networks)
- HF: High-frequency measurement (switch-mode power supplies operating above 40 kHz)
Current-frequency domain
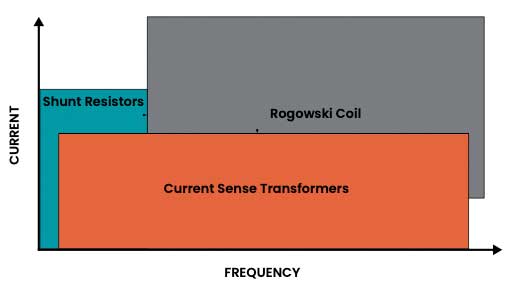
While several sensing technologies are available—including shunt resistors, Rogowski coils, and current sense transformers (CSTs)—the CST stands out when accuracy, galvanic isolation, and efficiency at high frequencies are essential.
Technology landscape: Comparing sensing methods
Selecting the right current sensing technology requires balancing trade-offs in accuracy, cost, power dissipation, isolation, and frequency response.
| Technology | Advantages | Limitations | Typical applications |
|---|---|---|---|
| Shunt resistor | Low cost, simple, no phase error | High loss, no isolation | Low-power DC/DC, battery monitoring |
| Hall-effect sensor | High accuracy, galvanic isolation, DC & AC sensing | Expensive, requires power, temperature sensitive | Industrial drives, medical, precision systems |
| Current sense transformer (CST) | Accurate, low-loss, isolated, good EMI immunity | No DC response, core saturation at very low frequency | SMPS, AC line monitoring, solar/UPS |
| Rogowski coil | Wide bandwidth, no core saturation, high current | Needs integrator, poor low-frequency response | Transient analysis, arc fault detection, power quality |
Every CST has a minimum usable frequency below which phase shift and amplitude error become unacceptable for control purposes. As frequency decreases, the induced secondary voltage becomes small relative to magnetizing current and burden resistor effects, which leads to increasing phase lag and distortion; true DC components are not transferred but still bias the core flux and can cause flux walking toward saturation if not reset.
In practice, many catalog current sense transformers specify a lower cutoff in the low‑kilohertz range and are not suitable for true DC measurement, because only the AC component is transferred while any DC component merely biases the core and can lead to flux walking if the core is not reset.
The decision often comes down to whether the application requires high efficiency and strong isolation at high frequency—an area where CSTs consistently outperform alternatives.
Application domains
CSTs are widely adopted wherever high‑frequency AC current must be monitored efficiently and safely.
Typical domains include:
- SMPS and DC‑DC converters: precise peak or average current feedback for regulation, over‑current protection, and current‑mode control.
- High‑voltage monitoring: isolated current measurement in systems requiring basic, functional, or reinforced insulation.
- Solar inverters and UPS: high‑frequency current feedback in noisy environments, often at elevated bus voltages.
- Industrial automation and motor drives: robust sensing in EMI‑rich systems, often combined with digital control.
- Automotive and EV battery management: isolated measurement of converter and charger currents, with stringent size and safety constraints.
Operating Principles of Current Sense Transformers
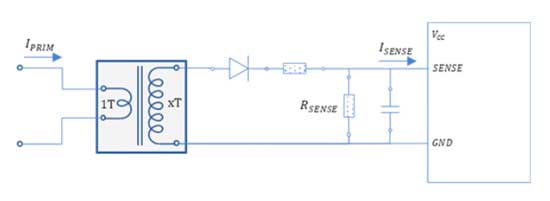
The operation of a current sense transformer is grounded in the fundamentals of electromagnetic induction. When an AC current flows through the primary winding, it induces a proportional current in the secondary. This secondary current, when passed through a terminating resistor, produces a measurable voltage directly proportional to the original current.
Ideal relationships
(1) Sense current vs. primary current (ideal CST)
IPrim=N⋅IsenseI_{\text{Prim}} = N \cdot{I_{\text{sense}} }
Where N means a turn-ratio. Voltage sense is a direct measurement of a primary current Iprim
(2) Sense voltage across terminating resistor
Vsense=RT⋅IprimNV_{\text{sense}} = R_T \cdot \frac{I_{\text{prim}}}{N}
Non-ideal behavior and losses
Flowing primary current slightly differs from measured current value, as the core of current sense transformers needs to be magnetized by magnetizing current. Hysteresis losses (IFe) are typically negligible for CSTs. The magnetizing current can be identified from basic parameters as a source of amplitude error.
(3) Primary current composition
Magnetic modeling and optimization
To optimize CST parameters, magnetic Finite Element Method (FEM) analysis is used. Magnetic field distribution analysis helps determine magnetic losses and phenomena related to phase shift between measured and sensed current values.
Comparator-based measurement
A CST integrates easily into analog or digital measurement systems. The sense voltage—i.e., the voltage drop across the external terminating resistor RT – is commonly used as the comparator input voltage.
(4) Comparator input and output behavior
Comparator’s tasks is to compare measured Vsense value to assigned reference voltage Vref, where Vref value typically defines maximum voltage drop we can measure on RT – under Isense is flowing:
As result – we get final referenced output voltage Vout, which can be directly used for discrete or analog regulation systems or for monitoring purpose.

Current sense transformer selection guidelines
Accurate and reliable CST implementation depends on proper selection of both the magnetic component and the measurement network.
Key design parameters include:
- RMS current rating to avoid copper and core overheating under maximum load.
- Volt‑second product and core flux density to ensure adequate margin to saturation over the full duty‑cycle and frequency range.
- Terminating resistor RT, which defines sense voltage level, sensitivity, and bandwidth.
- Isolation voltage and insulation system (basic, functional, reinforced) to satisfy safety standards and creepage/clearance requirements.
- Mechanical constraints (package, pad layout, window size) and primary conductor style (PCB trace, wire, busbar).
A practical design flow can be split into three main steps.
Step 1. Product series choice based on safety
The first step is to define application constraints: maximum current, insulation level, operating voltage, and form‑factor limits.
YAGEO catalog CSTs, for example, offer solutions up to about 1.5 kV with appropriate creepage and clearance for reinforced insulation, and package families optimized for continuous currents up to tens of amperes and switching frequencies into the low‑MHz range. Full‑custom CSTs are often used when current exceeds catalog ranges or when non‑standard busbar or PCB geometries are required.
The catalog portfolio covers mechanically optimized constructions for applications up to 50 A with a wide range of turns ratios. Some products support measurement frequencies up to 2 MHz. Full custom designs are available for wider current ranges.
Step 2 – Part Number Choice, Working Point, and Terminating Resistor
With a suitable series identified, the next step is to select the turns ratio and calculate the operating flux density and burden resistor.
Input Parameters. Typical inputs are:
- Peak primary current Ipk
- Switching frequency f and duty cycle D
- Comparator reference voltage Vref (which sets Vsense,max)
- Effective core area Ae (from datasheet)
Relating equations to datasheet fields
When translating the design equations into actual part selection, it helps to explicitly map datasheet parameters to their design role. Typical CST datasheets specify: turns ratio (e.g., 1:50 or 1:100), maximum primary RMS or peak current, usable frequency range, primary insertion impedance, isolation voltage, creepage/clearance distances, and operating temperature range. In practice, the turns ratio sets the scaling between primary current and secondary current/voltage, the maximum primary current defines the limit before saturation or overheating, and the frequency range indicates where amplitude and phase errors remain within specification.
Cross‑checking maximum primary current, chosen burden resistor and switching frequency together is essential, because these three parameters jointly determine the core flux swing, losses and the integrity of the output waveform.
Working point and flux density
Selection starts with CST turns ratio based on working point (flux density B) under given conditions: frequency (f), duty cycle (D), and Vref. Datasheets specify the effective core area Ae used in flux estimations.
(5) Flux density working point (conceptual)
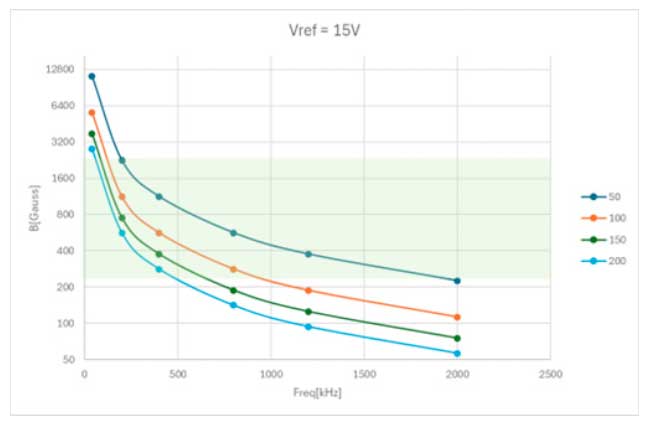
To stay in the linear part of the core B/H characteristic, the working point B should typically be within 250–2200 Gauss, with the absolute maximum specified in the datasheet. This region determines a feasible solution domain for part selection.
Higher frequencies generally require lower turns counts and higher Vref, while lower frequencies require higher turns ratios and may use lower Vref. The turns ratio N impacts sensitivity: higher N lowers the working point and Vsense, reducing sensitivity.
Terminating resistor calculation
Once a part number is selected, determine the terminating resistor value.
(6) Terminating resistor from peak conditions
Step 3. Measurement error, signal delay & sensitivity
Analyze amplitude and phase shift error. Amplitude error is mostly caused by CST losses, where magnetizing current plays a significant role and is typically small and linear (often < 2%). Phase error depends on burden and parasitics and should be minimized during design.
(7) Amplitude error due to magnetizing current
(8a) Phase shift (general)
(8b) Phase shift (simplified when RT ≫ RDC,sec)
(8c) Maximum phase error estimate
Sensitivity
(9a) Sensitivity (V/A)
(9b) Sensitivity error
From calculation to design‑in rules
The quantitative analysis above can be condensed into a few practical design‑in recommendations. For a given maximum primary current and target sense voltage, the designer first selects a standard turns ratio, then calculates a burden resistor that fits the controller’s input range and power rating. If the burden resistor is chosen too high, the resulting secondary current may be insufficient to keep the core in its linear region, increasing the risk of saturation and waveform distortion; if it is too low, the sense voltage becomes small and more susceptible to noise.
In addition, the selected current rating, burden value and switching frequency must be considered together with the datasheet’s frequency and flux‑density limits to ensure that the CST remains within its specified operating window across normal and fault conditions.
Case study: High-accuracy CST performance
Consider an automotive current sensing application such as battery management or DC‑DC converter current monitoring, with the following conditions:
- Reference voltage Vref=15 V
- Estimated peak primary current Ipk=29 A
- Frequency f=200 kHz
- Duty cycle D=0.8
- Mechanical maximum size around 13 mm × 11 mm × 8 mm
A catalog series (for example, YAGEO CSFA family) is selected that meets insulation and size constraints. Within the PMS9494 range, turns ratios of 1:50, 1:100, 1:150, and 1:200 are available; flux‑density calculations show that 1:50 slightly exceeds the recommended 2200 Gauss limit, while 1:100 falls nicely in the mid‑range, leaving margin for variations in frequency, current, and duty cycle.
Using N=100, the burden resistor required at 29 A peak and 15 V reference is approximately:
RT=15⋅10029≈52 Ω
A standard 50 Ω value is a convenient practical choice and keeps the secondary DCR contribution negligible.
Magnetizing current under these conditions is on the order of a fraction of a milliampere, resulting in amplitude error well below 0.01%. Simplified phase‑shift calculations yield roughly 1 degree of phase angle at 200 kHz, corresponding to a phase‑related amplitude error of about 0.0164%, demonstrating the extremely high accuracy achievable with a correctly selected CST.
The resulting sensitivity is:
sensitivity≈14.5 V29 A≈0.5 V/A
showing how burden choice directly sets volts‑per‑ampere gain and influences effective dynamic range at the comparator or ADC input.
Designing a Custom Current Sense Transformer
When catalog parts cannot meet the mechanical or current requirements, custom CSTs can be designed around the same principles.
Core Choice – Key considerations include:
- Ferrite material tailored to the frequency range and acceptable flux density, with targets for Bmax that keep hysteresis and core loss under control.
- Trade‑off between higher Bmax (for compact designs) and phase error/saturation margin over the full load and temperature range.
Window Utilization – The physical window must accommodate the chosen primary conductor style, secondary winding, insulation layers, and creepage/clearance:
- Busbar, PCB copper, or wire primaries set different constraints on minimum window height and insulation thickness.
- Fill factor guidelines ensure manufacturability and robust insulation, while leakage inductance is kept under control to preserve bandwidth.
Loss and Temperature – A quick loss and temperature‑rise estimation combines:
- Copper loss in primary and secondary windings from RMS currents and DCR.
- Core loss from AC flux density and operating frequency, using material loss curves or Steinmetz‑type equations.
These calculations define whether the selected core and winding scheme meet thermal limits across the intended ambient range.
Step 1: Series choice
Automotive applications require functional insulation. With the noted mechanical constraints, select CSFA series and use the YAGEO Group product selector to locate a suitable range.
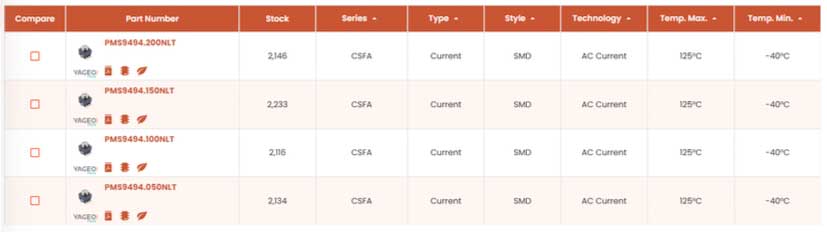
Step 2: Part selection and working point
Open the datasheet to review parameters. In this case, four turns ratios are available for the PMS9494 product range.
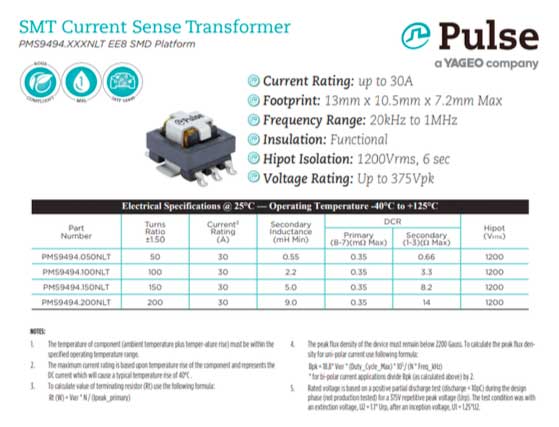
To better understand, we calculate working point based (flux density B) according to Eq.5 based on our automotive application conditions: Freq. = 200kHz, Vref=15V, DutyCycle=0.8. This equation is also specified in datasheet (Fig. 10, Notes, Pkt 4). Calculations can be systemized as in Table 2:
| N | DutyCycle | Vref [V] | Freq [kHz] | Ipk [A] | B [Gauss] | Rsense [Ω] |
|---|---|---|---|---|---|---|
| 50 | 0.8 | 15 | 200 | 29 | 2256 | 25.86207 |
| 100 | 0.8 | 15 | 200 | 29 | 1128 | 57.72414 |
| 150 | 0.8 | 15 | 200 | 29 | 752 | 77.58621 |
| 200 | 0.8 | 15 | 200 | 29 | 564 | 103.483 |
The N=50 option exceeds the suggested limit of B = 2200 Gauss and is excluded. The 1:100 option (PMS9494.100NLT) places B mid-range within the recommended window, providing flexibility for wider switching frequency or overcurrent.
From Eq. (6), the terminating resistor for the selected part is approximately RT ≈ 50 Ω. The secondary winding DCR is < 10% of RT and has negligible influence on phase shift under these conditions.
Step 3: Error and sensitivity estimates
Previous calculated values of B and RT allows us to calculate the amplitude error of the magnetizing current:
Amplitude error due to magnetizing current is very small. Example calculation yields approximately 0.00154%, indicating the magnetizing current component is not measured.
Simplified phase shift calculation indicates a very low signal shift
In this configuration, the measurement error is only 0.0164% and demonstrates exceptional accuracy achievable with well-designed CSTs.
Sensitivity of selected part number under application requirements will be:
Choice of terminating resistance influence sensitivity and sensitivity error.
Step 4: Behavior Under Fault and Overload Conditions
Under overload or short‑circuit conditions, both peak flux density in the core and power dissipation in the burden resistor increase significantly.
Important checks include:
- Estimating peak flux during worst‑case pulses to ensure saturation is either avoided or its impact on protection accuracy is acceptable.
- Ensuring the burden resistor rating (and any clamping components) can withstand transient energy without failing.
- Verifying creepage and clearance distances and insulation design under surge and fault voltages, especially in high‑voltage systems.
Protection schemes often add diodes and clamps to manage reset and overvoltage, as discussed in the SMPS application section below.
Step 5: PCB Layout and EMC Considerations
Good PCB practice is crucial to preserve CST accuracy and minimize EMI issues.
Key layout rules:
- Minimize loop area between primary return path and secondary/burden loop to reduce susceptibility to common‑mode noise and radiated fields.
- Keep secondary leads and the burden resistor physically close, use short traces, and apply Kelvin connections where precision is required.
- Treat the sense circuitry as a small‑signal network; separate its ground references from high‑dv/dt nodes using star‑point grounding and, where appropriate, split planes or local filtering.
These layout practices are particularly important in SMPS designs, where CST signals interface directly with high‑speed current‑mode controllers.
Application in Switched‑Mode Power Supplies
Current sense transformers are widely used in SMPS controllers to monitor peak or average inductor current with high efficiency and isolation. Here is a practical framework example for deploying CSTs in this role.
Basic SMPS Use Case
In a typical implementation, a 1‑turn primary is formed by the power trace or lead that carries the converter’s inductor or switch current. The CST secondary, with many turns, drives a burden resistor that develops a low‑voltage signal proportional to primary current, which is then fed into a controller’s current sense input.
The basic relationship:
Vout=Ipri⋅RTNsecV_{\text{out}} = \dfrac{I_{\text{pri}} \cdot R_T}{N_{\text{sec}}}
shows that, for a given primary current, the designer chooses RTR_T and NsecN_{\text{sec}} to achieve the desired maximum sense voltage (for example, 1 V/A scaling).
Design‑in notes for SMPS engineers
For typical SMPS use, a practical design‑in sequence is: define the maximum primary current and switching frequency, pick a standard CST ratio compatible with insulation and size constraints, then choose a burden resistor so that the maximum current produces a sense voltage within the controller’s specified input range. The datasheet’s recommended burden range should be respected, especially near the upper current or lower frequency limits, to avoid driving the core into saturation.
On the mechanical side, route the primary conductor so that all the current to be measured passes through the core aperture, keep the loop area of the primary and secondary/burden loop small to minimise stray inductance and EMI, and maintain PCB creepage and clearance distances in line with the transformer’s isolation rating and application safety requirements.
Core Reset and Diode Usage
For high duty‑cycle operation, a key design requirement is ensuring that the CST core is reset each switching period to prevent flux walk and saturation.
A common practice is to place a diode in series with the secondary, across the burden network, so that during the off‑time the core sees a reverse voltage and returns to zero flux, while the reset voltage is isolated from the controller input. A Zener diode may also be added to clamp the secondary voltage during fault conditions and protect both the CST and downstream circuitry.
Without proper reset, residual flux accumulates each cycle, causing the sensed current to appear lower than the true primary current and potentially driving the controller into destructive over‑current conditions.
Turns Ratio Trade‑Offs
Off‑the‑shelf CST families often offer multiple turns ratios in the same package size. Design trade‑offs when choosing a higher versus lower turns ratio include:
- Higher turns ratio improves signal‑to‑noise ratio by producing a larger secondary current and thus higher voltage across a given RTR_T, but increases winding resistance and leakage inductance.
- Higher turns ratio generally reduces flux density for a given output voltage, which helps avoid saturation and reduce core loss, but may slightly shrink bandwidth due to higher impedance.
- Lower turns ratio supports higher primary current (for the same core size) and can improve bandwidth, but may require lower RTR_T and reduce signal amplitude.
Analysis shows that, for a given package, different turns ratios can be optimized to balance efficiency, accuracy, and bandwidth, and that online selection tools can automate flux‑density checking to avoid saturation.
SMPS Application Examples
Example 1 – LTC3706 Secondary‑Side Synchronous Forward Controller
Analog Devices’ LTC3706 controller documentation compares CST‑based sensing with resistive methods for high‑efficiency, high‑output‑voltage converters.
In one example, a current sense transformer on the secondary side monitors inductor current in a synchronous forward topology. The CST provides:
- Isolation between control and power domains.
- Lower power loss versus shunt sensing at high current.
- High usable frequency range, well aligned with the controller’s switching frequency and control bandwidth.
The CST sense voltage is fed into the controller’s current sense pin, and the turns ratio plus burden are chosen so that the maximum expected current corresponds to the controller’s internal sensing threshold.
Example 2 – TI TIDM‑02009 EV Traction DC‑DC Converter
Texas Instruments’ TIDM‑02009 ASIL‑D‑assessed traction DC‑DC converter reference design uses two Coilcraft CST2010‑100L 1:100 CSTs to sense primary inductance current in a bidirectional converter linking a 400/600 V bus to a 12 V battery.
The converter employs peak current‑mode control, with the CSTs providing isolated feedback of high‑speed current waveforms. The CSTs are selected to:
- Support the full operating current range without core saturation.
- Deliver sufficient sense voltage at the controller input for robust noise immunity.
- Meet automotive isolation and reliability requirements.
This example illustrates how catalog CSTs can be integrated into safety‑critical EV systems using standard design flows and online selection tools.
Integrated Design Considerations
Bringing together the calculation and application perspectives, a practical CST design and selection process for SMPS and automotive systems involves:
- Defining electrical, safety, and mechanical requirements (current range, bus voltage, insulation class, ambient and size).
- Choosing a CST series and tentative turns ratio that satisfy insulation and size constraints while keeping flux density within the recommended window.
- Calculating the burden resistor to map peak current to the desired sense voltage, checking resistor power and controller input limits.
- Estimating amplitude and phase errors from magnetizing current and parasitic elements, verifying that they are acceptable over the entire operating frequency range.
- Implementing appropriate core reset and secondary protection (diodes, clamps) to prevent flux walk and overvoltage during faults.
- Validating performance in circuit through measurements or simulation, and iterating turns ratio or burden value if necessary.
By following this structured flow, designers can confidently exploit the advantages of current sense transformers in high‑performance power converters while avoiding common pitfalls related to saturation, bandwidth, and noise.
Conclusion
Current sense transformers combine high accuracy, galvanic isolation, and low loss, making them a technology of choice for high‑frequency AC current measurement in SMPS, solar inverters, UPS, industrial automation, and automotive systems. With a disciplined selection and calculation process, errors well below 1% in both amplitude and phase are achievable, even in compact, high‑current applications.
As energy efficiency accelerates, CSTs will continue enabling next-generation power systems. CSTs exhibit low measurement error compared to shunts and Rogowski coils due to minimal temperature rise, shielding against external EM fields, and lower energy dissipation than shunts.
Further Reads:
For readers who prefer a concise, datasheet‑oriented view focused on parameter interpretation and practical design‑in rules, see also the companion article “Current Sense Transformer Datasheet and Design‑in Guide.” It distils the main equations and selection criteria from this paper into a shorter checklist suitable for day‑to‑day SMPS and protection design work.
FAQ about Current Sense Transformers
A Current Sense Transformer is a transformer optimized for current measurement rather than power transfer, providing galvanic isolation and a low‑loss voltage signal proportional to AC or high‑frequency current. It is widely used in switch‑mode power supplies, solar inverters, industrial drives, and automotive power electronics where efficiency and isolation are critical.
Compared with shunt resistors, Hall‑effect sensors, and Rogowski coils, CSTs offer very low power dissipation and strong isolation in the high‑frequency domain. They cannot sense DC, but for AC and high‑frequency currents they often provide better efficiency, EMI robustness, and phase accuracy than resistive or Hall‑based solutions.
CSTs are mainly used in SMPS and DC‑DC converters for peak or average current‑mode control, in high‑voltage converters for isolated current feedback, and in solar, UPS, industrial automation, and EV powertrains where fast, isolated current measurement is required.
Accuracy is primarily affected by magnetizing current, core material and flux density, burden resistor value, and parasitic inductances and capacitances, which together determine amplitude and phase error. Careful selection of turns ratio and burden, flux‑density checking, and, where needed, FEM magnetic analysis keep total error typically well below 1% over the intended frequency range.
Designers start from electrical, safety, and mechanical requirements, then choose a product series and turns ratio that satisfy insulation and flux‑density limits. They calculate the terminating resistor from peak current and desired sense voltage, check error and phase shift against the operating frequency range, and finally validate performance in the real SMPS or automotive application.
No, a current sense transformer cannot measure true DC current because it operates on the principle of changing magnetic flux and therefore only responds to AC or high‑frequency components. Any DC component in the primary current does not appear in the secondary signal but still biases the core and can lead to flux walking and eventual saturation if the core is not properly reset each switching cycle.
How to Select a Current Sense Transformer
- Step 1: Define application requirements
Identify current type and range (peak and RMS), switching frequency, and insulation class, together with mechanical limits such as footprint, height, and primary conductor style (PCB trace, wire, or busbar). Confirm any safety requirements for creepage, clearance, and reinforced or functional insulation.
- Step 2: Choose product series and part number
Use the manufacturer’s product selector to pick a CST series that meets isolation and size constraints, then select a tentative turns ratio that keeps core flux density within the recommended window over your duty cycle and switching frequency. This corresponds to Step 1 and Step 2 of the 3‑step selection method described in this article.
- Step 3: Calculate terminating resistor
rom peak primary current and the controller’s maximum sense or comparator reference voltage, calculate the burden resistor so that the highest expected current produces the target sense voltage. Verify that the resistor’s power rating and tolerance are adequate for normal operation and fault conditions.
- Step 4: Analyze measurement errors
Estimate amplitude error due to magnetizing current and phase shift from the interaction of burden resistor and magnetizing inductance over the operating frequency range. If needed, refine turns ratio or burden value to keep amplitude and phase errors within your design targets for current‑mode control or protection thresholds.
- Step 5: Validate with case study
Add any required secondary diodes or clamps to ensure proper core reset and to protect the CST and controller inputs, then prototype the design in the actual SMPS or automotive converter. Measure sense waveforms, verify that current limits and protections behave as intended, and iterate component values only if necessary.

