










This article is based on edited newsletter written by Pablo Blázquez, Frenetic power electronics engineer that explores a key player in power supply design, the Flyback Transformer.
Key Takeaways
- Flyback Transformer is essential for low- to medium-power isolated power supplies like adapters and LED drivers.
- This article reviews the operating principles, applications, and design methodology for Flyback Transformers.
- Flyback Transformers operate in discontinuous or continuous conduction modes, influencing efficiency and design choices.
- The design process includes selecting core materials, determining winding layouts, and ensuring compliance with safety standards.
- Validation of design through testing and efficiency optimization is crucial for successful Flyback Transformer applications.
Flyback converters are among the most widely adopted architectures for low‑ to medium‑power isolated power supplies used in adapters, LED drivers and auxiliary rails in industrial and consumer systems. At the heart of these converters is the flyback transformer, which magnetically behaves as a coupled inductor that stores and transfers energy between primary and secondary while also providing galvanic isolation.
This article introduces the operating principle of flyback transformers, reviews key application scenarios and topologies, and then outlines a structured approach to transformer design suitable for practicing design engineers.
Operating Principle
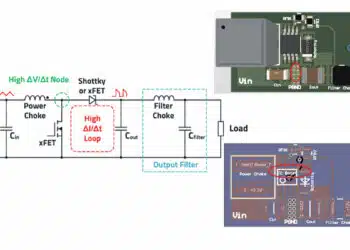
In a flyback converter, energy transfer is time‑multiplexed between primary and secondary sides. During the MOSFET on‑time, the rectified input voltage is applied to the primary winding, magnetizing current ramps up, and energy is stored in the core and its intentional air‑gap as . When the MOSFET turns off, the primary voltage reverses, the secondary rectifier becomes forward‑biased, and the stored energy is delivered to the output capacitor and load until the magnetizing current decays to zero or to the minimum current level defined by the operating mode.
Two regimes are typically distinguished.
In discontinuous conduction mode (DCM), the magnetizing current returns to zero before the next cycle, which simplifies small‑signal behavior at the cost of higher peak and RMS currents.
In continuous conduction mode (CCM), the current never falls to zero within a cycle, reducing current stress but introducing a right‑half‑plane zero that complicates loop compensation.
Application Context and Use Cases
Flyback transformers are favored whenever a compact, cost‑effective solution is required that can provide isolation and robust operation over wide input and load ranges. Typical use cases include external AC–DC power adapters, where the transformer ensures user safety and protects downstream electronics, LED drivers, where it maintains a regulated output under strongly varying LED string characteristics, and low‑power isolation tasks such as feedback supplies or sensor interfaces where the required power is modest but the isolation barrier is mandatory.
In these contexts, the magnetics must simultaneously satisfy isolation voltage and creepage/clearance mandated by safety standards, acceptable efficiency and thermal behavior at the intended ambient conditions, and a winding structure that is producible at scale with controlled tolerances. These constraints drive the choice of core geometry and material, operating frequency, and the detailed arrangement of primary, secondary and any auxiliary windings.
Topologies and Their Characteristics
Multiple flyback‑related topologies are in use today, each imposing different requirements on the transformer. The following table summarizes the most relevant variants and their impact on transformer design.
Flyback‑related topologies
| Topology | Typical power range | Key advantages | Design impact on transformer |
|---|---|---|---|
| Hard‑switched flyback | Up to tens of watts | Simple, low parts count | Higher leakage energy to snub, tighter EMI constraints |
| Boundary/QR flyback | Low to medium power | Reduced switching loss, valley switching possible | Magnetizing inductance tuned for valley timing |
| Active‑clamp flyback (ACF) | Medium to higher power | Leakage energy recycling, lower switching stress | Clamp‑related constraints on leakage and dv/dt |
| Single‑output flyback | Broad | Simple regulation scheme | One secondary dimensioned for full power |
| Multi‑output flyback | Broad | Multiple isolated rails from one magnetics set | Cross‑regulation, winding placement trade‑offs |
| Forward / half‑bridge | Higher power than flyback | Higher efficiency at higher power levels | Transformer optimized for transfer rather than storage |
In particular, the active‑clamp flyback has gained popularity in high‑efficiency adapters and USB‑PD supplies because it adds an auxiliary switch and clamp capacitor that recover leakage energy and enable lower‑loss, often quasi‑resonant switching. For the transformer designer, this shifts leakage inductance from being purely parasitic to becoming a controlled design parameter and efficiency lever.
From Requirements to Transformer Specifications
Any transformer design begins with a well‑defined set of electrical, environmental and regulatory requirements. Electrically, the design engineer must consider the minimum and maximum input voltage (for example, 90–265 VAC rectified to DC), the nominal output voltage and maximum load current, and the desired maximum output power and efficiency, along with the intended control mode (DCM, CCM, or boundary/QR) and nominal switching frequency.
Safety and isolation requirements are derived from applicable standards such as IEC 62368‑1 or IEC 61558, which determine insulation systems, creepage and clearance distances, and test voltages for hipot and partial discharge. Environmental constraints include ambient temperature range, acceptable temperature rise for copper and core, and any derating policies that apply in the end equipment.
From these inputs, key transformer‑level targets are established: primary magnetizing inductance, turns ratio between primary and secondary, maximum flux density swing, peak and RMS currents in each winding, and the envelope for copper and core losses that the thermal design can tolerate.
Electric Design Methodology
The electrical design can be organized into a sequence of steps that link system requirements to concrete winding data. The first step is to select operating mode and switching frequency: for power levels in the range of roughly 10–60 W, boundary‑mode or quasi‑resonant flyback operation around 65–140 kHz is common because it offers a compromise between magnetics volume and switching losses.
Start by translating the system‑level requirements into transformer‑level specs.
Given:
- Input: ,
- Output: , , number of outputs
- Power: and target efficiency
- Isolation and safety: required isolation voltage, creepage/clearance, insulation class, applicable standards (e.g., IEC 62368‑1, IEC 61558)
- Environment: ambient temperature, cooling, maximum allowed temperature rise
- Control: DCM/CCM/QR, switching frequency range
Derived design targets:
- Peak and RMS currents on primary and secondary
- Required magnetizing inductance
- Maximum flux density and core size
- Turns ratio to meet duty cycle and voltage stress limits
A clear specification up front avoids redesign cycles once thermal or EMI issues appear.
Step‑by‑step electrical design
Below is a typical DCM flyback transformer design flow for a single‑output supply; you can extend it to multiple outputs with appropriate secondary current and turns calculations.
Select operating mode and switching frequency
The first step is to select operating mode and switching frequency: for power levels in the range of roughly 10–60 W, boundary‑mode or quasi‑resonant flyback operation around 65–140 kHz is common because it offers a compromise between magnetics volume and switching losses.
- Choose DCM or CCM based on power and control IC. For 10–60 W offline adapters, boundary/QR DCM is common.
- Set nominal switching frequency per controller IC limits, efficiency, and EMI considerations (e.g., 65–140 kHz for many offline flybacks).
Higher frequency reduces magnetics size but increases switching and core losses.
Estimate turns ratio
The second step is to choose an appropriate turns ratio. A typical strategy is to select a reflected voltage on the primary that is a fixed fraction of the minimum input voltage, ensuring that the MOSFET drain‑source voltage in the off‑state remains well below its rating even when leakage inductance and snubber behavior are considered. The relationship between primary turns , secondary turns , output voltage and reflected voltage allows the engineer to set the duty cycle at minimum input within a practical range, often around 0.45–0.5.
You want to keep MOSFET drain voltage and rectifier voltage within device limits while achieving the desired output voltage with reasonable duty cycle.The ideal secondary reflected voltage is often chosen as a fraction of the minimum input:where is typically 0.3–0.7 depending on design tradeoffs. Using:or equivalently via :where is the diode forward drop. Choose (e.g., 0.45–0.5) at .
Determine primary inductance and peak current
Once the turns ratio and duty cycle are established, the required primary inductance follows from the power transfer relationship. For DCM, power transfer per cycle is:Solve for or based on allowable peak current and desired inductance. At full load:The primary current ramp slope is:Ensure that the chosen and duty cycle do not push current beyond MOSFET and current‑sense limits. The resulting current ramp slope and conduction intervals are checked over the input voltage range to ensure compliance with duty‑cycle limits imposed by the controller IC and with device current ratings.
Check CCM/DCM boundary (if relevant)
If designing for DCM or boundary mode, verify that at minimum load, the demagnetizing interval finishes before the next switching period, i.e., magnetizing current returns to zero. If the design unintentionally enters CCM, adjust or operating conditions.
Secondary current and RMS calculations
With the primary inductance and turns ratio defined, the secondary peak and RMS currents can be derived from the magnetizing current waveform. In ideal DCM behavior, the secondary peak current is the primary peak current scaled by the turns ratio, and the RMS value follows from the triangular conduction interval, directly determining copper cross‑sections, allowable resistive losses and the temperature rise of each winding.
Secondary peak current (in ideal DCM) is:Compute secondary RMS current based on waveform and duty ratio of the secondary conduction interval. Use these RMS values to size wire, rectifiers, and copper loss.
Core selection and gap design
Selecting a suitable core geometry and material is central to a robust flyback transformer design. The core must provide sufficient cross‑section to support the desired flux swing without saturation while also offering enough window area to accommodate all windings, interwinding insulation and any required margins, with common choices including EE, EF, ER, RM and PQ families.
Core shape and material
Choose core family (e.g., EE, EF, ER, RM, PQ) and material suitable for the switching frequency range and temperature. Vendors specify core loss vs. flux density and frequency; aim for a material with acceptable loss at your and expected .
Key considerations:
- Power level vs. core cross‑section .
- Winding window area sufficient for all windings plus insulation and margins.
- Bobbin compatibility with creepage/clearance and insulation system needed for your safety standard.
Flux density and air gap
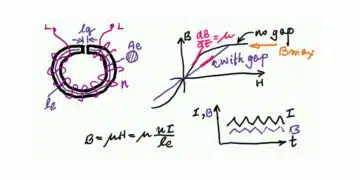
The intentional air‑gap largely defines the magnetizing inductance by dominating the magnetic reluctance of the core path, and manufacturers typically provide AL‑values as a function of gap length that enable direct calculation of required turns for a given inductance. Once a candidate combination of , core type and gap is chosen, peak flux density under worst‑case conditions—maximum input voltage, maximum load and highest operating temperature—is verified against the saturation characteristics of the chosen material, with a typical practice to maintain below roughly 0.3–0.35 T for ferrites in the relevant range.
Magnetizing inductance relates to turns and gap as:With a significant air‑gap, is dominated by the gap, making primarily a function of gap length. Use the chosen and target to derive the required gap; core vendors often provide AL‑value vs. gap tables or calculators.
Core losses are then estimated using manufacturer loss curves or Steinmetz‑type models, taking into account the actual flux‑density swing and switching frequency, and care is taken to correctly model the non‑sinusoidal flyback waveform so that losses are not understated.
Check:
- Peak flux density under worst‑case and load, keeping margin to saturation (e.g., < 0.3–0.35 T for many ferrites at operating temperature).
- Core loss using vendor curves for , , and temperature; ensure total core loss is compatible with your thermal budget.
Winding design and layout
The arrangement of windings in the available window directly affects leakage inductance, parasitic capacitance, efficiency and electromagnetic interference. Wire gauge and type are chosen to support the RMS current with acceptable resistive loss and temperature rise, accounting for skin and proximity effects at the switching frequency, and at higher frequencies or higher currents litz wire or parallel strands are often used to reduce AC resistance.
Wire selection
- Choose copper wire gauge to handle RMS current with acceptable temperature rise and resistive loss.
- At higher frequencies, consider litz wire or parallel strands to reduce skin and proximity effect losses.
- Ensure current density targets (e.g., 2–5 A/mm² depending on cooling) are met.
Layering, leakage, and coupling
The winding layout is devised to balance tight coupling, which minimizes leakage inductance and reduces energy dissipated in clamps or snubbers, against the need to manage interwinding capacitance, which couples common‑mode noise across the isolation barrier. From a safety perspective, sufficient creepage and clearance distances are implemented using appropriately designed bobbins, margin tapes, triple‑insulated wire or other measures as specified by the applicable safety standard.
The resulting transformer parasitics must be consistent with the EMI strategy at the converter level. Excessive leakage inductance increases the energy handled by snubber or clamp networks, whereas high interwinding capacitance can degrade common‑mode noise performance and increase the burden on EMI filters; in an active‑clamp flyback, leakage inductance becomes both a design variable and an efficiency optimization knob because its stored energy is partially recycled.
- Place primary and secondary windings to optimize coupling and minimize leakage inductance; a sandwich structure (primary–secondary–primary) can reduce leakage but may complicate insulation.
- Use interleaving carefully, as tighter coupling reduces leakage but can increase capacitance, affecting EMI and common‑mode noise.
- Where multiple secondaries exist, route high‑power secondaries closer to the primary, with low‑power or auxiliary windings elsewhere.
Insulation, creepage, and clearance
- Use bobbins and margins that meet creepage/clearance distances for the required isolation voltage and pollution degree.
- Insert tape or triple‑insulated wire as required between windings.
- Ensure safety‑critical dimensions are maintained under worst‑case manufacturing tolerances.
Losses and thermal considerations
After an initial winding and core configuration is defined, the total loss budget is evaluated. Copper losses are calculated from RMS currents and DC plus AC resistance values for each winding, including the impact of proximity and skin effects, while core losses are estimated using the manufacturer’s data for the chosen material and operating conditions.
Any additional losses associated with leakage inductance, such as energy dissipated or recycled in clamp circuits, are also included, and these losses feed into a thermal model of the transformer that may range from a simple lumped thermal‑resistance estimate to more detailed analysis for higher power designs. The objective is to verify that the hottest spot in the core or windings remains within material and insulation limits under worst‑case ambient conditions and that the temperature rise aligns with the overall thermal design of the power supply.
Total transformer temperature rise is driven by copper losses, core losses, and any eddy/proximity effects.
- Copper loss: summed over all windings. Minimize by optimizing wire gauge, length, and layout.
- Core loss: Use manufacturer loss data for your , frequency, and temperature.
- Leakage and stray losses: Energy dissipated in snubbers or clamps originates from leakage inductance; excessive leakage both hurts efficiency and stresses components.
Perform a thermal estimate based on total loss and thermal resistance from winding/core to ambient. Verify that the hottest spot remains within insulation and material limits.
Example design outline
As an illustration, consider a 24 W offline adapter with a universal AC input range, a 12 V/2 A output and a quasi‑resonant flyback controller operating around 65 kHz. The designer first selects an appropriate reflected voltage and turns ratio to keep the MOSFET drain voltage safely below its rating across the full input range and expected leakage spikes, and then derives the required magnetizing inductance and peak current from the maximum output power and efficiency target.
A core from, for example, the EE or ER family is chosen to provide the necessary inductance, flux‑swing margin and window area, and the primary and secondary turns are calculated from the AL‑value of the selected core and the chosen turns ratio. A winding structure is then defined to meet isolation, leakage and capacitance requirements, losses and temperature rise are estimated, and if limits are exceeded the design is iterated by adjusting gap length, wire gauge, switching frequency or core size.
In practice, this analytical process is complemented by prototyping and measurement, where magnetizing and leakage inductances, resistance and temperature behavior are validated and correlated with the design calculations to ensure repeatable production performance.
- Input: 90–265 VAC, rectified to 120–375 VDC
- Output: 12 V, 2 A
- Mode: DCM or QR
- Frequency: 65 kHz nominal
- Efficiency target: 85–88%
A typical flow would:
- Pick a reflected voltage and turns ratio so that MOSFET drain voltage remains within device limits under worst‑case line and leakage spikes.
- Compute primary inductance from power, frequency, and allowable peak current.
- Choose an EE or ER core that provides sufficient cross‑section and window area at the computed inductance and flux swing.
- Determine primary and secondary turns from , chosen AL, and turns ratio.
- Design winding structure (layer order, wire gauge, insulation), then estimate copper and core losses.
- Iterate turns or gap length to fine‑tune inductance and flux density while checking thermal margins.
Safety, Compliance and Validation
A flyback transformer intended for production must satisfy safety, EMI and manufacturability constraints in addition to its electrical and thermal objectives. Compliance with safety standards is demonstrated through documentation of creepage, clearance and insulation systems, as well as through dielectric tests such as hipot and partial discharge measurements performed on representative samples.
EMI performance at the converter level is evaluated with the actual transformer in place, and design tweaks to winding layout, shield windings or common‑mode chokes may be necessary to meet conducted and radiated emission limits. Finally, series samples from the intended manufacturing process are characterized to confirm consistency of inductance, leakage, resistance and high‑voltage performance, closing the loop between analytical design and real‑world implementation.
Conclusion
Flyback transformers remain a central element in modern isolated power supplies because they combine energy storage, voltage conversion and safety isolation in a compact magnetic structure. For design engineers, a successful flyback transformer design connects system‑level requirements to detailed electrical, magnetic and mechanical parameters through a disciplined methodology that addresses operating mode, turns ratio, inductance, core selection, winding layout, losses and thermal behavior.
As power levels, efficiency requirements and regulatory expectations continue to evolve, variants such as active‑clamp and quasi‑resonant flybacks offer additional levers for optimizing performance while keeping stresses within acceptable limits. A rigorous approach to specification, design and validation ensures that the resulting transformer can be confidently deployed in adapters, LED drivers and a wide range of isolated power applications.
References
- Flyback Converter Design and Calculation
- Flyback Transformer Explained; WE Webinar
- SMPS with Flyback Transformer Explained
- USB PD 3.0 Flyback Transformer Optimisation
- Flyback Transformer Modelling
- High Voltage Transformer Safety Design Requirements – Case Study
- Transformer Topologies in Power Converters
FAQ: Flyback Transformer Understanding and Design
A flyback transformer is a coupled inductor that stores energy in its core during the primary switch on-time and releases it to the secondary when the switch turns off, providing galvanic isolation and output regulation in isolated power supplies. It is widely used in AC–DC adapters, LED drivers, auxiliary rails, and low-power isolated sensor or feedback supplies where compact size and cost-effective isolation are required.
In discontinuous conduction mode (DCM), the magnetizing current fully returns to zero before the next switching cycle, simplifying control but increasing peak and RMS currents. In continuous conduction mode (CCM), the current never falls to zero, reducing current stress but introducing a right-half-plane zero that complicates loop compensation and control design.
Common flyback-related topologies include hard-switched flyback, boundary or quasi-resonant flyback, active-clamp flyback (ACF), and single- or multi-output variants, as well as forward and half-bridge converters for higher power. Active-clamp flyback in particular is popular in high-efficiency adapters and USB-PD supplies because it recycles leakage energy and enables lower-loss quasi-resonant switching, turning leakage inductance into a controlled design parameter.
Key specifications include input voltage range, output voltage and maximum load current, maximum output power and target efficiency, operating mode (DCM, CCM, or QR), and switching frequency range. From these, the designer derives magnetizing inductance, primary-to-secondary turns ratio, maximum flux density swing, peak and RMS winding currents, and acceptable copper and core loss envelopes.
The turns ratio is chosen so that the reflected secondary voltage on the primary is a defined fraction of the minimum input voltage, typically around 30–70%, to keep MOSFET drain and rectifier voltage within safe limits. This sets a practical maximum duty cycle at minimum input, often around 0.45–0.5, and links output voltage and diode drop to the primary-to-secondary turns ratio.
In DCM, the transferred power is proportional to the magnetizing inductance, the square of the primary peak current, and the switching frequency, allowing the designer to solve for either inductance or peak current based on power and efficiency targets. The resulting current ramp and peak current must remain within MOSFET, current-sense, and controller duty-cycle limits across the full input voltage range.
Core selection is driven by power level, required flux density swing, switching frequency, and available window area for windings and insulation, with EE, EF, ER, RM, and PQ families commonly used. The intentional air gap largely sets the magnetizing inductance, and designers use AL-value versus gap data to choose turns and gap while keeping peak flux below about 0.3–0.35 T to avoid saturation and maintain acceptable core losses.
Winding design focuses on selecting copper gauge or litz wire to handle RMS currents with acceptable temperature rise while minimizing DC and AC losses, including skin and proximity effects. Layout must balance tight coupling to reduce leakage inductance against the need to control interwinding capacitance, while also meeting creepage, clearance, and insulation requirements defined by safety standards.
Total transformer loss consists of copper losses from RMS currents and winding resistance, core losses set by flux swing, frequency and material, and additional losses related to leakage inductance energy handled by snubbers or clamp circuits. These losses feed into a thermal model to ensure that hotspot temperatures in core and windings stay within insulation and material limits under worst-case ambient conditions.
Safety and compliance are validated by meeting creepage, clearance, insulation class, and test requirements from standards like IEC 62368-1 and IEC 61558, typically confirmed via hipot and partial-discharge testing on representative samples. EMI performance is evaluated at converter level with the final transformer, and adjustments to winding layout, shield windings, or common-mode filtering may be required to satisfy conducted and radiated emission limits.
How-to: Design a Flyback Transformer Step by Step
- Define system requirements
Start by specifying the input voltage range, output voltage, maximum load current, maximum output power, and target efficiency for your converter. Include operating mode (DCM, CCM, or boundary/QR), switching frequency range, ambient temperature, cooling conditions, and applicable safety standards such as IEC 62368-1 or IEC 61558.
- Derive transformer-level targets
From the system requirements, calculate primary magnetizing inductance, primary-to-secondary turns ratio, peak and RMS currents, and maximum allowable flux density swing. Establish acceptable envelopes for copper and core losses consistent with the overall thermal design of the power supply.
- Select operating mode and switching frequency
Choose DCM, CCM, or boundary/QR operation based on power level, control IC capabilities, and regulation requirements; for 10–60 W offline adapters, boundary or quasi-resonant DCM around 65–140 kHz is common. Set the nominal switching frequency within controller limits to balance magnetic size, switching loss, and EMI constraints.
- Estimate turns ratio and reflected voltage
Choose a reflected secondary voltage on the primary as a fraction of the minimum input voltage, typically 0.3–0.7, to keep MOSFET drain and rectifier voltages within safe limits. Use the chosen reflected voltage, output voltage, diode drop, and desired maximum duty cycle (about 0.45–0.5 at minimum input) to determine the primary-to-secondary turns ratio.
- Compute primary inductance and peak current
Use the power transfer relationship for DCM to solve for magnetizing inductance or peak current based on output power, efficiency target, and switching frequency. Verify that primary current ramp slope, peak current, and duty cycle remain within MOSFET, current-sense, and controller limits over the full input voltage range, and check that intended operation (DCM or boundary) is maintained at load extremes.
- Select core geometry, material, and air gap
Choose a core family such as EE, EF, ER, RM, or PQ that provides sufficient cross-section and window area for the required inductance, flux swing, and winding space. Use AL-value versus gap data to determine the number of primary turns and air-gap length that achieve the target magnetizing inductance while keeping peak flux below roughly 0.3–0.35 T and core losses within your thermal budget.
- Design windings and layout
Select wire gauge or litz wire to support RMS currents with acceptable temperature rise and low DC and AC resistance. Arrange primary, secondary, and auxiliary windings to balance tight coupling for low leakage inductance with controlled interwinding capacitance, while meeting creepage, clearance, and insulation requirements using suitable bobbins, tapes, or triple-insulated wire.
- Estimate losses and perform thermal checks
Calculate copper losses from RMS currents and winding resistances, including skin and proximity effects, and estimate core losses using manufacturer data for the chosen material, flux swing, frequency, and temperature. Add losses associated with leakage inductance in snubber or clamp circuits, then use a thermal model to confirm that hotspot temperatures in core and windings stay within insulation and material limits under worst-case ambient conditions.
- Prototype, measure, and iterate
Build prototype transformers and measure magnetizing and leakage inductances, winding resistances, and temperature rise under representative operating conditions. Correlate measurements with calculations, then adjust gap length, turns, wire gauge, core size, or switching frequency as needed to refine inductance, flux density, loss distribution, and thermal margins.
- Validate safety, EMI, and manufacturability
Document creepage, clearance, and insulation systems to demonstrate compliance with the relevant safety standards and verify performance via hipot and partial-discharge testing on production-representative samples. Evaluate conducted and radiated EMI at converter level with the final transformer, introducing layout tweaks, shield windings, or additional filtering if needed, and confirm that manufacturing tolerances still meet electrical, thermal, and safety targets in series production.