








In this video presentation prof, Sam Ben-Yaakov explains how capacitor self-balancing works in flying-capacitor buck converter and how to simulate it using Spice modeling.
Introduction
Flying capacitor buck converters are increasingly used in high-efficiency power electronics due to their ability to reduce switching losses and improve voltage stress distribution across transistors. A critical aspect of their operation is the self-balancing behavior of the flying capacitor, which ensures stable midpoint voltage without active control. This paper investigates the theoretical and practical conditions under which self-balancing occurs, supported by simulation data and circuit analysis.
Key Takeaways
- Flying capacitor buck converters minimize switching losses and improve voltage distribution.
- Self-balancing occurs theoretically under symmetric switching but faces practical limitations.
- Simulations show stable balancing at Vin/2 under symmetric pulses, but failure under asymmetry.
- Minor timing mismatches can lead to significant charge imbalance, necessitating active control.
- Incorporating a balancing controller enhances reliability in practical applications.
1. Overview of Flying Capacitor Buck Converter
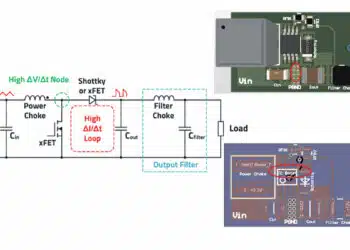
The flying capacitor buck converter operates by alternating the connection of a capacitor between different voltage levels, effectively splitting the input voltage and reducing stress on switching components. The topology typically includes four switches, an inductor, and a flying capacitor.
| Component | Function |
|---|---|
| Flying Capacitor | Stores and transfers charge between switching phases |
| Switches (Q1–Q4) | Control current paths and capacitor charging/discharging |
| Inductor | Filters current and stores energy |
| Output Capacitor | Stabilizes output voltage |
2. Self-Balancing Mechanism
The self-balancing mechanism in a flying capacitor buck converter refers to the natural tendency of the flying capacitor voltage (VFC) to stabilize at half the input voltage (Vin) without active feedback control. This behavior is rooted in the symmetry of charge transfer during alternating switching phases. When the system operates under ideal conditions, the net charge added to and removed from the flying capacitor over a full switching cycle is zero, resulting in a stable midpoint voltage.
2.1 Operating Modes and Duty Cycle Influence
The converter operates in two distinct regimes depending on the duty cycle (D):
- D < 0.5: The flying capacitor alternates between being connected to ground and Vin, producing output pulses of Vin/2.
- D > 0.5: The capacitor alternates between Vin and floating, allowing output pulses greater than Vin/2.
In both cases, the voltage swing across the switches is reduced to Vin/2, minimizing switching losses and allowing the use of lower-voltage-rated transistors.
2.2 Switching Phase Analysis
Each switching cycle consists of two primary phases:
- Phase A: The flying capacitor is connected to the output, discharging into the load. The current flows from the capacitor to the output inductor.
- Phase B: The input voltage minus the capacitor voltage is applied to the output, charging the capacitor. The current flows from the input through the switches into the capacitor.
If the durations of Phase A and Phase B are equal and the current profiles are symmetrical, the net charge transfer over one cycle is zero:
This leads to a stable capacitor voltage:
2.3 Stability and Correction Behavior
If the capacitor voltage deviates from Vin/2, the system exhibits a corrective behavior:
- If VFC < Vin/2, Phase B delivers more charge than Phase A removes, increasing VFC.
- If VFC > Vin/2, Phase A removes more charge than Phase B delivers, decreasing VFC.
This feedback-like behavior is passive and relies on the symmetry of the switching cycle. However, it is sensitive to component values and timing precision.
2.4 Practical Considerations
Several factors influence the effectiveness of self-balancing:
| Factor | Impact |
|---|---|
| Inductor Size | Large inductors reduce ripple current, slowing correction response |
| Capacitor Size | Large flying capacitors require more charge to adjust voltage |
| Pulse Width Accuracy | Even 1% mismatch causes imbalance due to cumulative charge error |
| Startup Conditions | Initial capacitor voltage of 0V may exceed transistor ratings |
These limitations suggest that while self-balancing is theoretically robust, practical designs benefit from active balancing control to ensure reliability under non-ideal conditions.
3. Simulation Setup and Results
To validate the theoretical self-balancing behavior of the flying capacitor buck converter, a time-domain simulation was conducted using LTspice. The simulation aimed to observe how the flying capacitor voltage responds to disturbances and whether it naturally returns to Vin/2 under ideal and non-ideal conditions.
3.1 Circuit Configuration
The simulated circuit includes:
- Four ideal switches (MOSFETs) controlled by synchronized pulse sources
- A flying capacitor modeled with a series voltage source to simulate initial charge
- An inductor and output capacitor to represent the load network
- Pulse generators with adjustable duty cycles and timing offsets
The flying capacitor is initialized at Vin/2 (e.g., 12.5V for a 25V input), then disturbed by a step change to 15V at 3 ms to test the system’s ability to self-correct.
3.2 Ideal Case: Symmetric Switching
In the first scenario, both switching phases (A and B) are driven by pulses of equal width (3 µs), resulting in symmetric charge and discharge cycles. The simulation shows:
- Capacitor current waveform is symmetrical around zero
- Midpoint voltage stabilizes at Vin/2 within 1 ms
- Inductor current shows expected ripple behavior
| Parameter | Observation |
|---|---|
| Capacitor Voltage | Returns to 12.5V after disturbance |
| Capacitor Current | Symmetrical waveform with equal positive and negative areas |
| Midpoint Voltage | Stable at Vin/2 with minimal ripple |
3.3 Non-Ideal Case: Asymmetric Pulse Width
To test sensitivity, one pulse was shortened to 2.95 µs (a 1.7% mismatch). This small change caused:
- Persistent imbalance in capacitor voltage
- Midpoint voltage drift and asymmetry
- Capacitor current waveform skewed, indicating net charge accumulation
This confirms that even minor timing errors can prevent self-balancing, especially when the inductor current is nearly constant.
3.4 Influence of Component Values
Further simulations explored the impact of component sizing:
| Component | Change | Effect |
|---|---|---|
| Inductor | Increased to 100 µH | Reduced ripple, slowed balancing response |
| Flying Capacitor | Increased capacitance | Higher energy storage, slower correction |
| Output Capacitor | Reduced capacitance | Increased ripple, potential instability |
3.5 Startup Behavior
At startup, the flying capacitor is uncharged (0V), which may expose switches to full Vin stress. Without a controlled startup sequence, this can exceed device ratings and cause failure. The simulation shows transient overshoot and asymmetry during the first few milliseconds, reinforcing the need for soft-start mechanisms.
3.6 Summary of Findings
- Self-balancing is confirmed under ideal symmetric switching
- Small timing mismatches disrupt balance and cause voltage drift
- Large inductance and capacitance slow correction response
- Startup conditions require careful management to avoid overstress
These results highlight the importance of precise timing and component selection in practical converter designs. While self-balancing is theoretically achievable, active control is essential for robust operation under real-world conditions.
4. Practical Limitations
While the flying capacitor buck converter demonstrates theoretical self-balancing under ideal conditions, real-world implementations face several practical challenges. These limitations stem from component tolerances, timing mismatches, startup behavior, and ripple dynamics. Understanding these constraints is essential for designing robust and reliable converters.
4.1 Timing Mismatches and Pulse Width Sensitivity
The self-balancing mechanism relies on equal charge and discharge durations. Even a small mismatch in pulse width—such as 2.95 µs vs. 3.00 µs—can introduce a net charge imbalance over time. This leads to:
- Gradual drift in flying capacitor voltage
- Asymmetrical current waveforms
- Loss of midpoint stability
In simulation, a 1.7% timing error caused the midpoint voltage to collapse, confirming that precise timing control is critical. This sensitivity is exacerbated by high inductor values, which reduce ripple and slow correction.
4.2 Component Tolerances and Drift
Real components exhibit manufacturing tolerances and temperature-dependent drift. These affect:
- Capacitance value of the flying capacitor
- Inductance and ESR of the output inductor
- Switching delay and rise/fall times of MOSFETs
Such variations can disrupt the symmetry of charge transfer, leading to persistent imbalance. Designers must account for worst-case tolerances and consider calibration or feedback mechanisms.
4.3 Startup Conditions and Transient Stress
At startup, the flying capacitor is typically uncharged. This causes the full input voltage Vin to appear across switches, potentially exceeding their rated voltage. Without a controlled startup sequence, this can result in:
- Overvoltage stress on transistors
- Unpredictable current spikes
- Failure to enter balanced operation
Soft-start circuits or pre-charging mechanisms are recommended to mitigate these risks.
4.4 Ripple Effects and Capacitor Sizing
Ripple voltage on the output and flying capacitor affects the accuracy of midpoint voltage. Key observations include:
- Small output capacitors increase ripple, destabilizing the load
- Large flying capacitors slow the balancing response due to high energy storage
- High-frequency switching reduces ripple but increases EMI concerns
| Design Parameter | Effect on Stability |
|---|---|
| Flying Capacitor Size | Large size slows correction; small size increases ripple |
| Inductor Value | High inductance reduces ripple but delays balancing |
| Switch Timing Accuracy | Critical for maintaining symmetrical charge cycles |
| Startup Voltage | Must be managed to avoid overstress |
4.5 Noise and Environmental Factors
External noise, PCB layout parasitics, and thermal drift can further degrade performance. For example:
- Switching noise can corrupt pulse edges, altering effective duty cycle
- Parasitic inductance and capacitance affect current paths and timing
- Temperature changes shift component behavior over time
Shielding, layout optimization, and temperature compensation are essential for maintaining balance.
4.6 Recommendation: Active Balancing Control
Given the sensitivity to timing and component variations, passive self-balancing is insufficient for production-grade converters. Designers should implement:
- Feedback loops to monitor and adjust flying capacitor voltage
- Digital control of pulse widths with calibration routines
- Startup sequencing to pre-charge capacitors and limit stress
These measures ensure consistent performance across operating conditions and manufacturing variability.
Conclusion
Flying capacitor buck converters offer compelling advantages in power density and efficiency. However, relying solely on self-balancing without control circuitry is risky in real-world applications. Simulation confirms that while self-balancing is achievable under ideal conditions, practical designs must account for component tolerances and timing errors. Incorporating a balancing controller ensures robust and reliable operation.
Frequently Asked Questions
A flying capacitor buck converter is a power topology that uses a capacitor to alternate voltage levels, reducing switching losses and voltage stress across transistors.
Self-balancing occurs when the flying capacitor naturally stabilizes at half the input voltage (Vin/2) due to symmetrical charge transfer during switching phases.
While theoretically sound, self-balancing is sensitive to timing mismatches and component tolerances. Active control is recommended for robust operation.
The system exhibits corrective behavior: if the voltage is too low, it charges more; if too high, it discharges more—aiming to return to Vin/2.
Even small mismatches in pulse width or ripple current can cause imbalance. Active control ensures stability under real-world conditions.
How to Simulate Self-Balancing in a Flying Capacitor Buck Converter
- Set up the LTspice schematic
Include four switches, a flying capacitor, an inductor, and a pulse-driven voltage source representing the capacitor.
- Configure pulse generators
Use two synchronized pulse sources with equal duty cycles (e.g., 3 µs each) to drive the switches.
- Apply initial disturbance
Set the capacitor voltage to Vin/2, then introduce a step change (e.g., from 12.5V to 15V) to test correction behavior.
- Observe capacitor current and midpoint voltage
Use waveform plots to verify symmetrical current and voltage stabilization over time.
- Test with asymmetric pulses
Modify one pulse width slightly (e.g., 2.95 µs) and observe imbalance, confirming the need for active control.
- Document results and limitations
Note the impact of inductor size, capacitor value, and startup conditions on balancing speed and reliability.